- Emergency Response Vehicle Detection by Autonomous Vehicles
An academic presentation exploring how self-driving cars should react when an emergency vehicle approaches from behind.
- Client
- UE
- Year
- Service
- Presentation Design

Overview
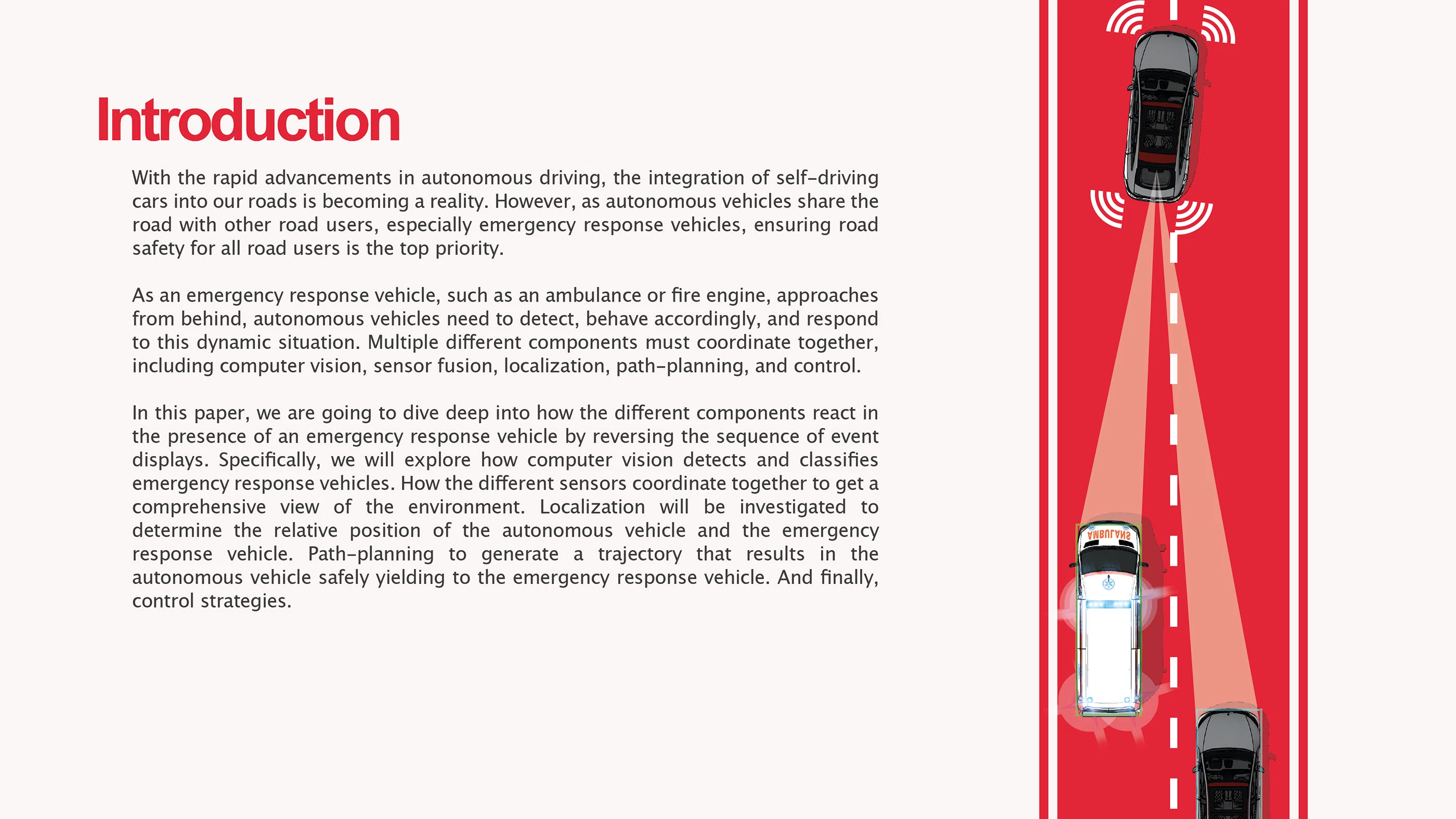
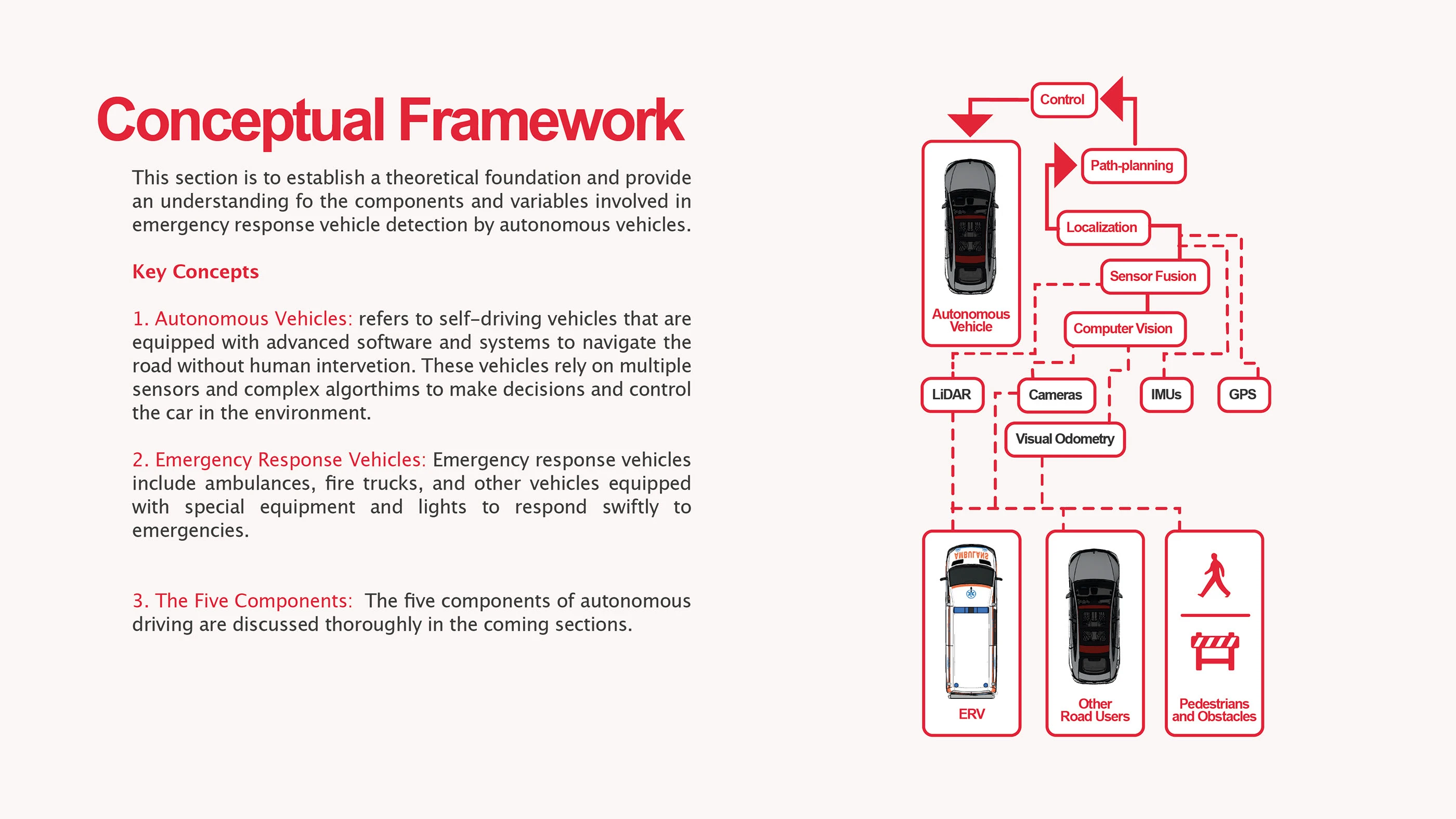
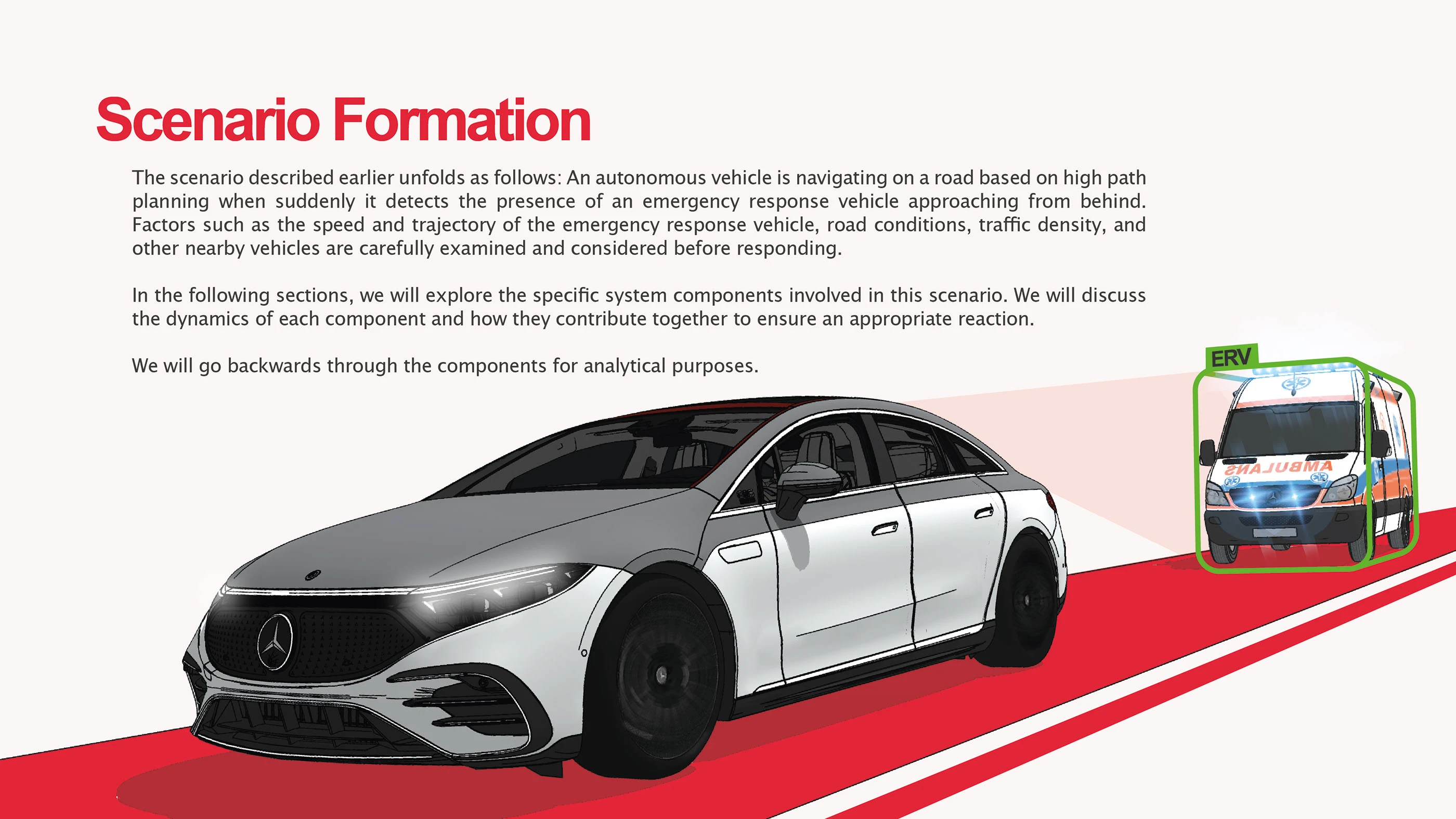
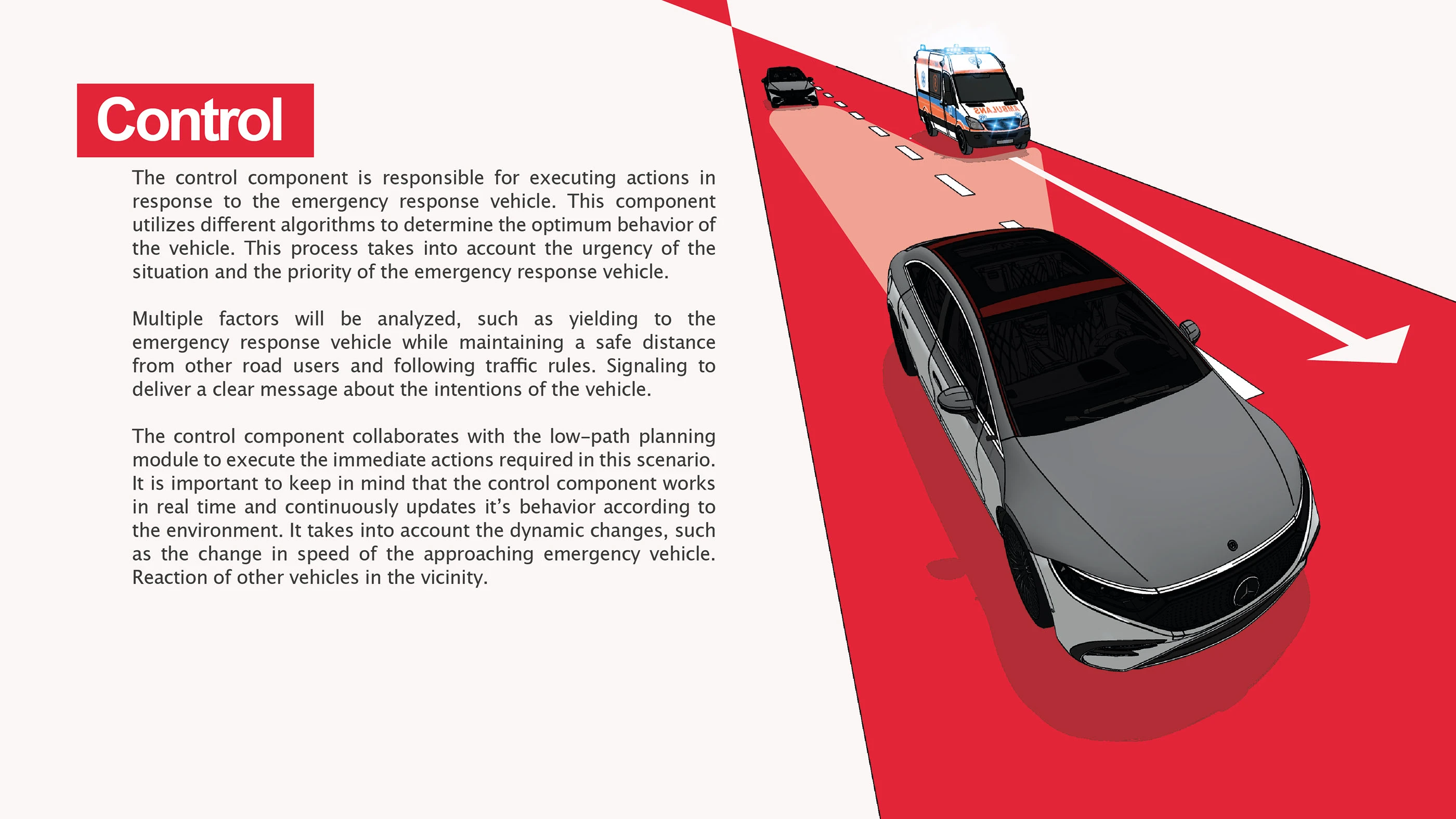
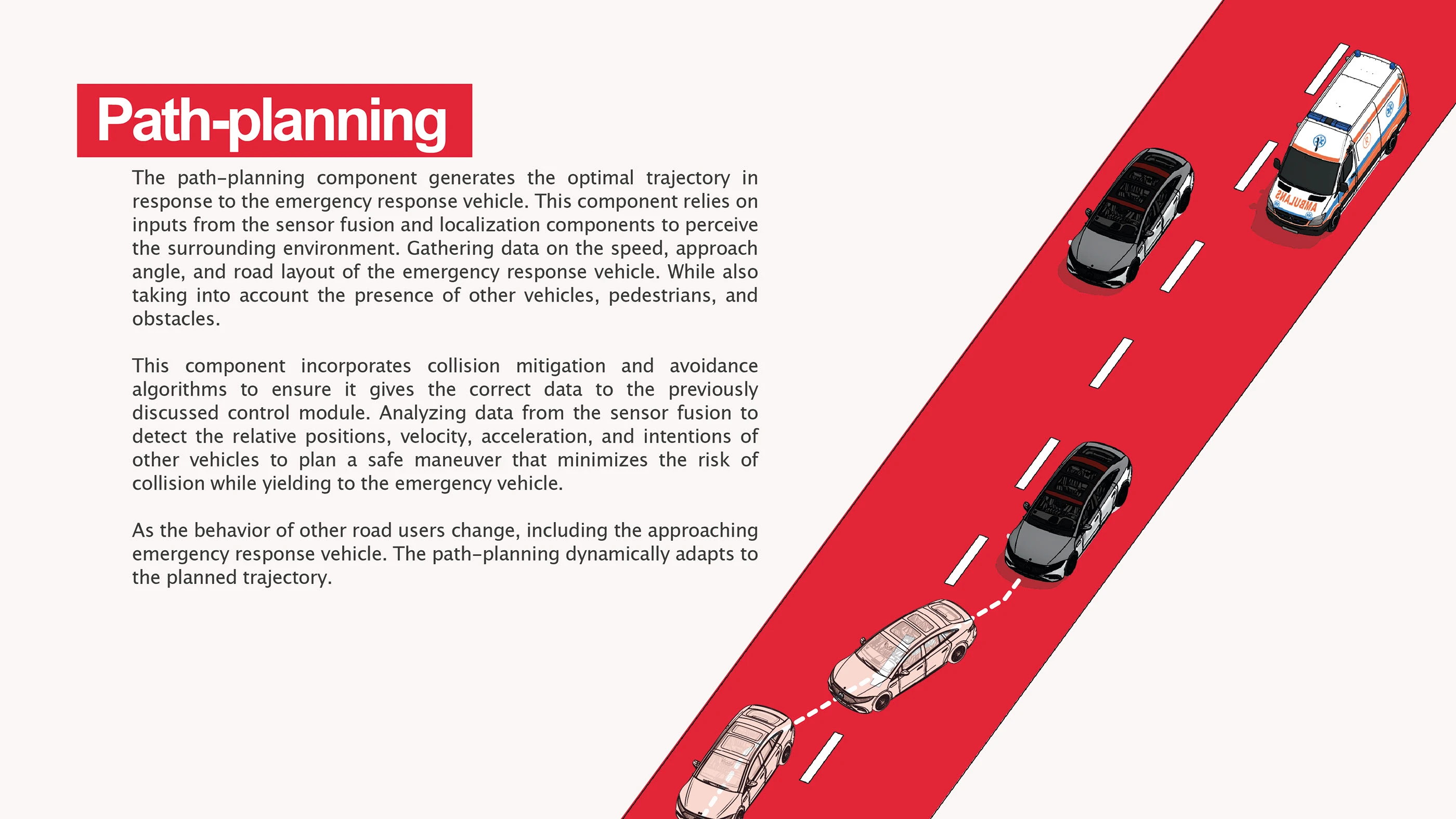
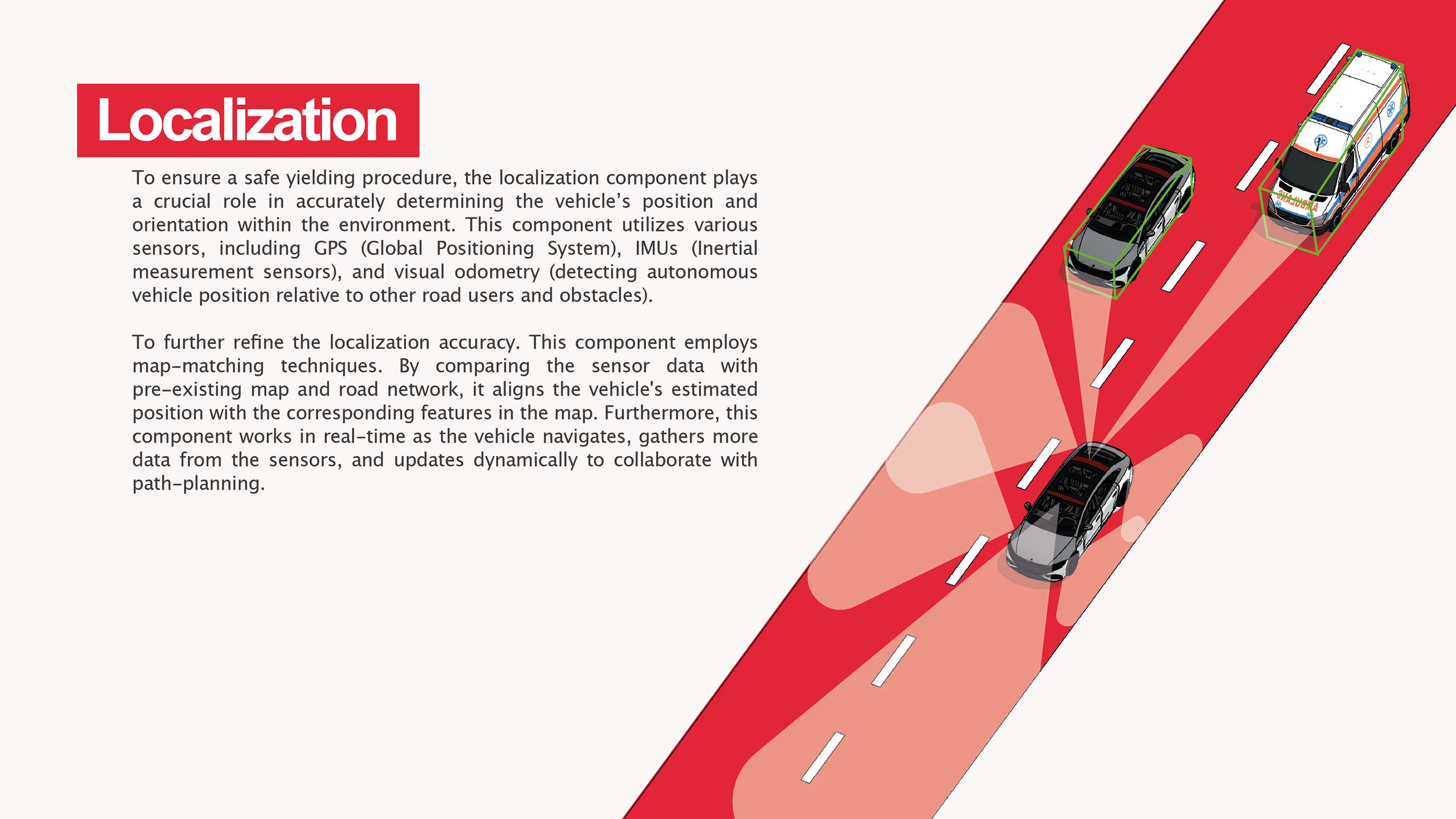
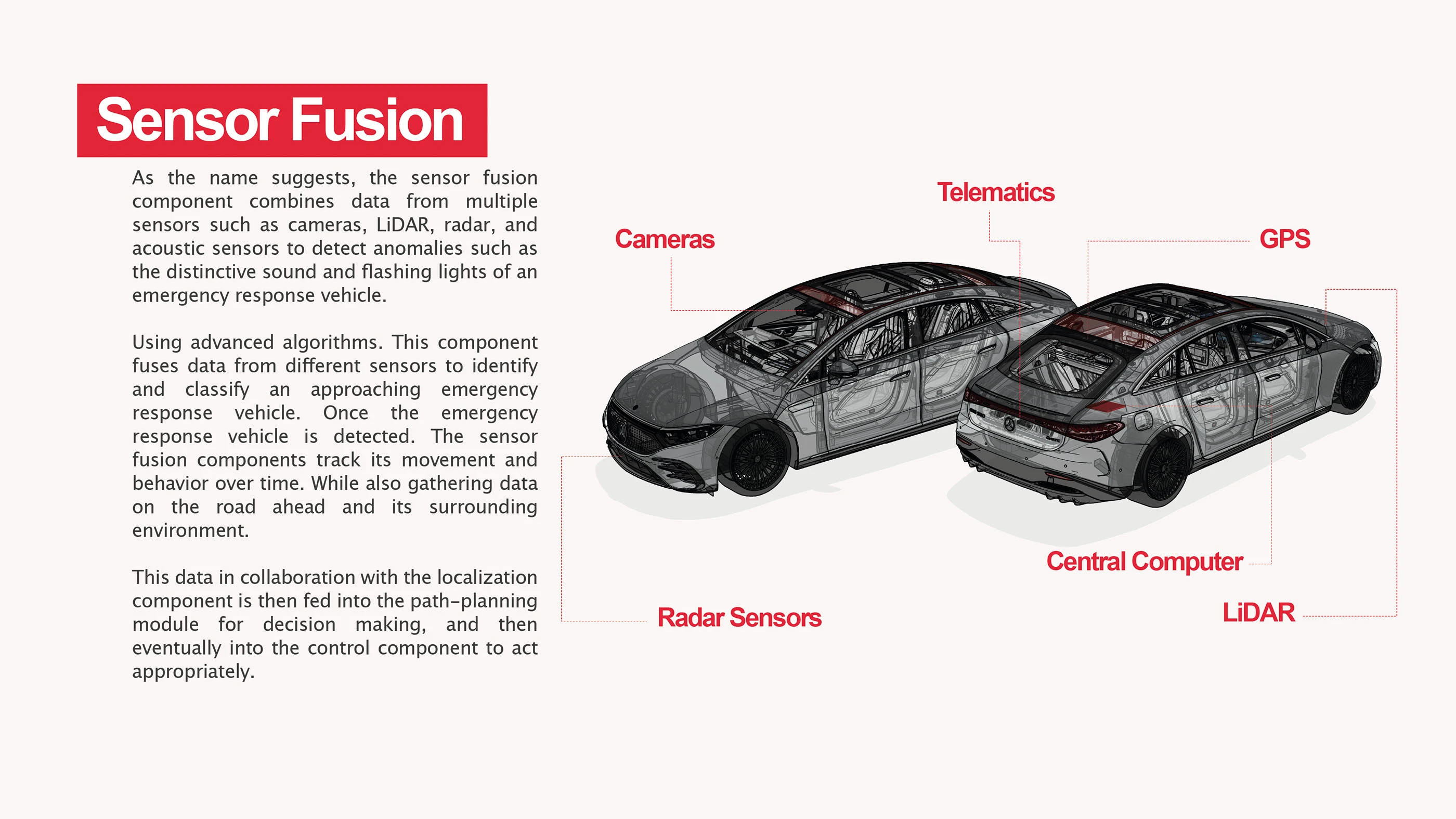
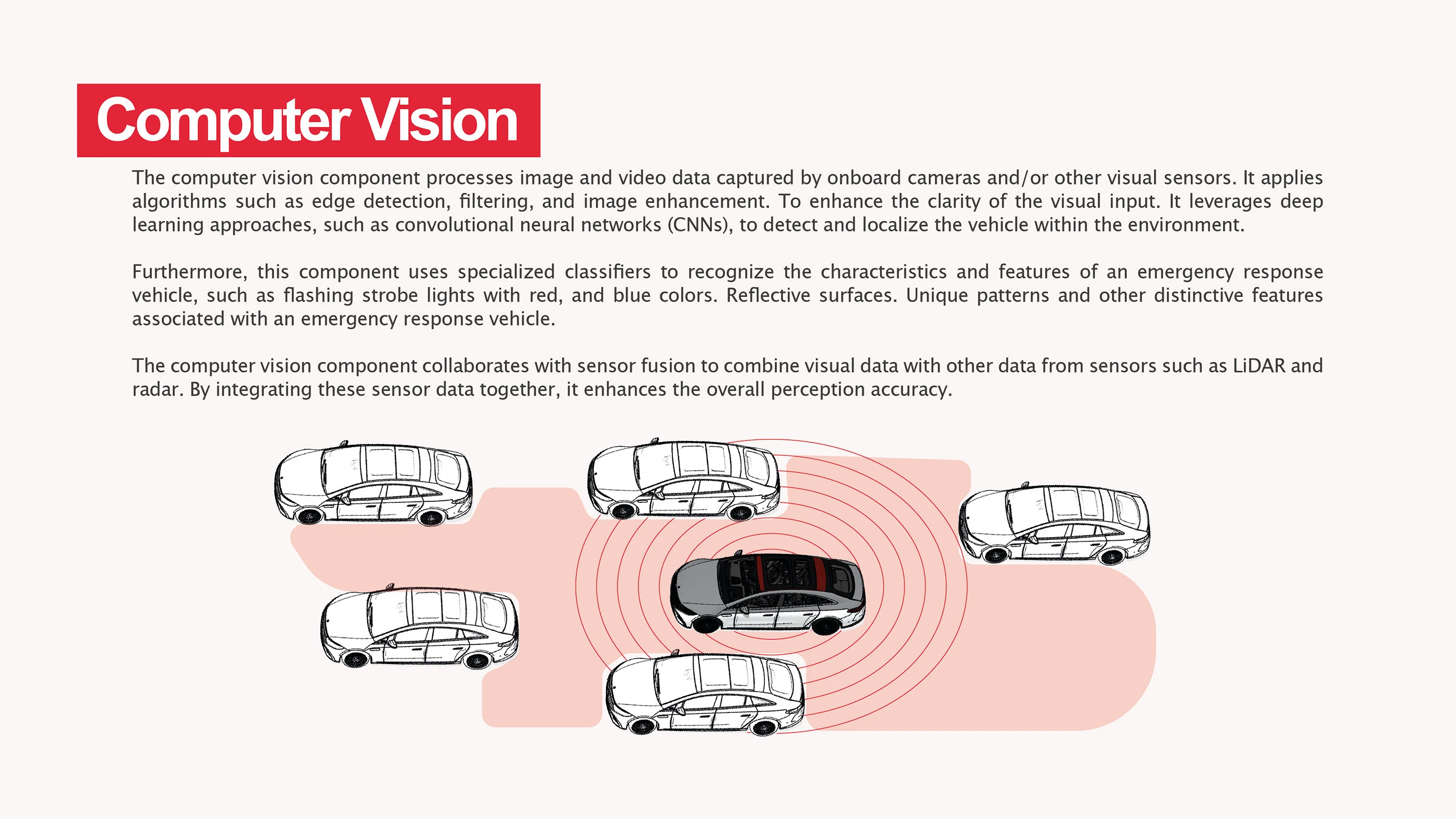
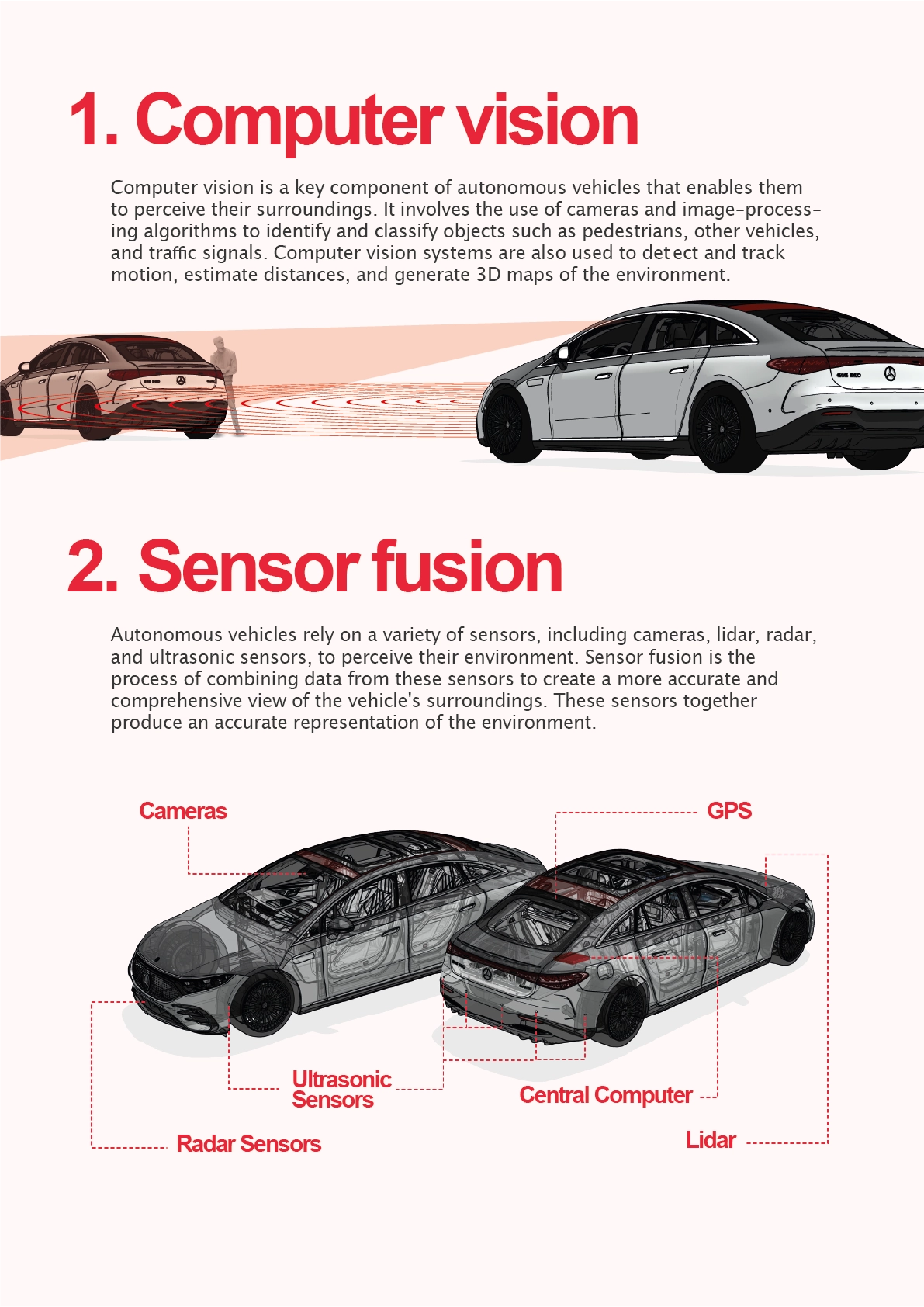
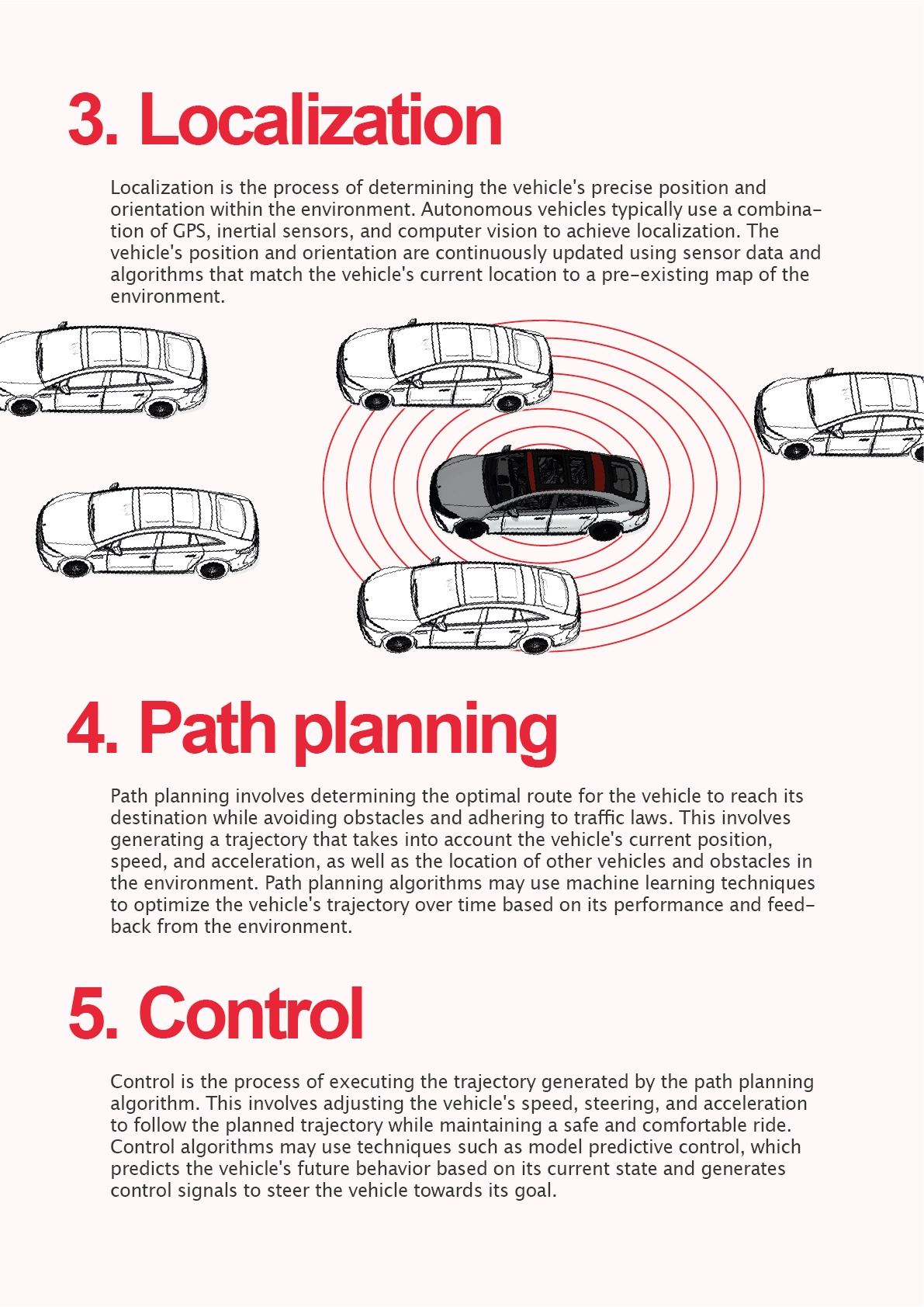
This presentation breaks down the sequence of steps an autonomous vehicle would follow if an emergency response vehicle appears behind it. The order goes in reverse, starting with control, which is the final action of steering or braking. Before control, there is path planning, where the system decides how to give way. Localization ensures the car knows exactly where it is on the road, while sensor fusion combines data from multiple sources for accuracy. At the foundation, computer vision recognizes visual cues such as flashing lights or vehicle shapes.
The presentation ties these elements together in a clear, structured way to show how complex the problem really is. Each stage builds on the one before it, making it possible for the autonomous vehicle to behave responsibly in a situation where seconds matter.


Tools Used
- Adobe Illustrator
- Adobe Photoshop
- SketchUp

